

寶米勒變頻器在施工升降機中的應用
bmller 2021-04-02
一、 引言
施工升降機是現代高層施工中必不可少的重要的垂直運輸設備。特別是在高層、超高層建筑施工中擔任了極其重要的任務,對于保證施工工期與安全,降低施工成本,減輕勞動強度起著不可替代的作用。本文介紹寶米勒起重專用變頻器在人貨兩用施工升降機上的應用、調試和現場功能測試驗證。
二、 施工升降機介紹
升降機作為一般高層建筑輸送人員及散碎材料的垂直運輸設備已被廣泛應用,普通施工升降機由于控制方式和設計等原因,存在以下幾個問題:
1、 采用接觸器控制,運行速度單一,一般速度為34-38m/min,運行速度低,影響施工速度和施工企業效益,對高層建筑此問題表現突出。如單純提高速度將造成加速度過大,結構和機構所受沖擊過大而加快齒輪齒條及制動盤的磨損,降低運行可靠性和增加維護成本。
2、 啟動沖擊大,對結構和機構損壞較嚴重。
3、 普通施工升降機采用機械抱閘強制制動,升降機從高速突然降到零速,由于慣性作用, 強制抱閘對結構和機構沖擊大,載人舒適度差,載貨料沖擊大。
4、 一般采用直接啟動或者星三角降壓啟動,啟動電流大,對電網沖擊大,影響其他設備的正常運行。
5、 負載變化造成停位不準確,對司機經驗要求較高。
普通施工升降機減速到平層時無爬行過程,由運行速度直接向零速減速,升降機的平層是靠司機目測手動控制實現,效率低,經常要上、下點動幾次才能準確平層。
三、寶米勒起重專用變頻器介紹
寶米勒起重機專用矢量變頻器,采用先進的控制理論,具有優異的力矩控制性能,專業針對起重配套行業設計,可靠的抱閘控制、輕負載升速、快速停車、超速保護、預勵磁、起動預轉矩補償、松繩檢測、起重機操作模式、主從控制等特點,保證起重行業使用的安全性、可靠性和高效性;面向起重行業高、中端用戶需求,有平移機構變頻、全變頻、能耗制動、回饋制動等多種成熟應用方案供用戶選擇;廣泛適用于各種起重機械的起升、俯仰、變幅、大車、小車、回轉、抓斗等機構的交流無級調速。
主要技術特點如下:
u 1、抱閘邏輯控制與監控功能——安全、可靠
l 準確的抱閘開啟和閉合控制時序,通過抱閘實時狀態反饋和起動預轉矩補償,確保控制的安全性和可靠性。
u2、輕負載升速功能——高效
l 起重機空鉤或輕載時實現2 倍速運行,提高裝卸效率。
u3、起重機操作模式——方便、靈活
l 有操縱桿模式、遙控模式、電動電位器模式、分級式操縱桿給定模式、分級式遙控給定模式、通訊給定模式等,方便起重機不同的應用場合。
u4、主從控制速度同步技術——高端運用
l 在雙起升機構提升一個重物時,主從控制速度同步功能保證兩個起升機構同步提升,確保安全。
5、主從控制功率平衡技術——高端運用
在兩個大功率電機通過減速箱剛性連接驅動一個起升機構時,主機采用速度控制, 從機采用力矩控制,實現功率平衡,保證兩個電機出力均勻。
6、第二電機控制及切換功能 —— 經濟
一臺變頻器通過參數自學習可以自動存儲兩四套電機參數,通過切換指令實現對兩組電機的高性能矢量控制;便于電氣傳動系統的控制,提高用戶競爭力。
7、松繩檢測功能——安全、可靠
防止在起重機繩索松弛的情況下,輕負載升速功能誤動作引發的不安全運行。
8、專業的網絡通訊功能——靈活
支持PROFIBUS-DP、以太網和MODBUS 通訊方式
能實現多個變頻器和PLC 之間的通訊連接
實現變頻器與PC 之間通信和數據傳輸,方便監控和參數設定。
9、控制回路電源和主回路電源可以分別控制——安全
提高了用戶調試時的安全性
便于故障診斷與維護
10、危險速度監視、快速停車及超速保護——安全
有速度監視和轉矩監控;
支持3 種快速停車模式:電氣制動的停車、電氣制動加機械制動的停車、機械制動的停
11、預勵磁及起動預轉矩補償——安全、可靠
預勵磁功能是在啟動之前自動地對電機實行直流勵磁,以保證電動機快速地提供起動轉矩,并通過設定起動預轉矩補償值和調節勵磁的時間,使電動機的起動與機械制動器的釋放時間相配合,避免出現“溜鉤”現象。
12、電流矢量控制技術,零速時實現200%轉矩輸出,對各類起重機、提升機等場合應付自如。
快速的轉矩響應避免提升負載時的溜鉤現象
13、多電機并聯矢量控制,滿足變頻升降機控制需要。
四、寶米勒變頻器在施工升降機上的應用
1、設備相關參數介紹
|
設備參數 |
設備名稱 |
變頻調速建筑升降機,單籠無對重 |
|
額定載重量(T) |
載重量2T,自重3T |
|
|
提升速度(m/min) |
0~40m/min 可調 |
|
|
電機、減速箱參數 |
電機型號 |
客戶自有品牌 |
|
額定功率(kW) |
33kW,3 臺11kW 電機,采用硬鏈接,同軸輸出 |
|
|
額定電流(A) |
70.5A,單臺電機電流23.5A,3 臺70.5A |
|
|
額定電壓(V) |
380V |
|
|
額定轉速(RPM) |
1395 |
|
|
額定頻率(Hz) |
50 |
|
|
電氣系統參數 |
PLC |
ABB |
|
變頻器 |
MC200G0450T4 |
|
|
制動單元 |
DBU-055-4 |
|
|
輸入電抗器 |
120A/0.13mH |
|
|
旋轉編碼器 |
1024 線、10V~30V 電源(軸套式) |
|
|
制動電阻 |
阻值:5 歐姆;功率:50kW |
2、系統原理分析
機械系統
此系統所用升降機,為單籠無對重式建筑專用人貨升降機,工作高度為0~200m,設計提升極限速度為40m/min,整個系統采用安裝在支架上的齒條傳動,沿固定軌道進行運動,齒條可隨意裝載與拆除,從而實現任意調整升降機的工作高度。系統的動力來源為三個并聯連接的電機同時提供動力,三電機的輸出力矩均衡,輸出功率平衡。升降機系統采用了相對較為完善的安全控制系統,系統中使用了PLC 及變頻器,升降機下降時,系統處于發電狀態,回饋能量通過制動電阻消耗。
電氣系統
電氣控制系統略圖如下:
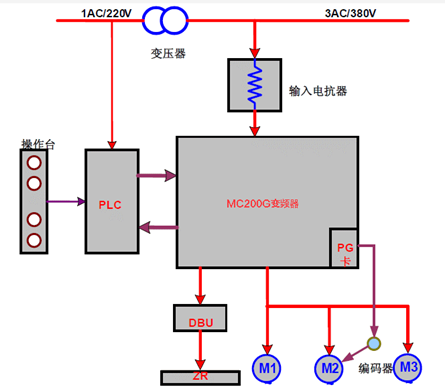
電氣控制系統,主要由PLC、變頻器、傳動電動機、減速機、制動單元、制動電阻箱、操作手柄、交流輸入電抗器、編碼器、變壓器等設備組成,實現對升降機的起停控制、上下運行、快慢行走、開閘抱閘控制及各種保護的控制,從而實現升降機的高效、安全、穩定運行。
在整個升降機的電氣控制系統中,變頻調速器是最為關鍵的控制設備,變頻器質量與性能的好壞,將直接影響到升降機的使用。寶米勒起重機專用變頻器,能夠提供完備的抱閘、松閘邏輯控制、高低速切換控制、開環閉環切換控制、多電機并聯矢量控制、可調節的制動電壓控制、高頻弱磁運行控制等功能,從而實現對升降機的完美控制。
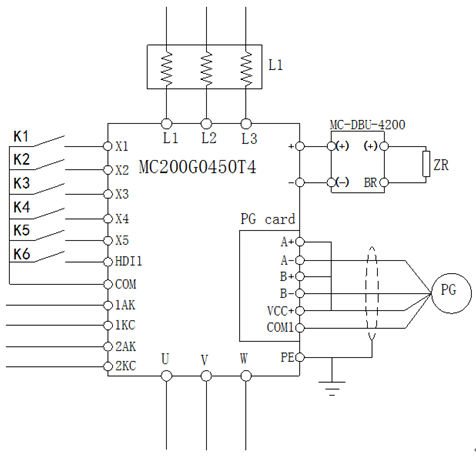
3、變頻器周邊連接圖內容說明
|
圖標符號 |
含義解釋 |
備注 |
|
MC200G0450T4 |
起重機專用變頻器 |
功率:45kW |
|
DBU-055G-4 |
制動單元 |
功率:55kW |
|
ZR |
制動電阻箱 |
5 歐姆/50kW |
|
S1~S5、HDI1 |
開關量輸入端子 |
輸入阻抗3.3k 歐姆 |
|
K1 |
K1:上升(上行) |
開關,閉合有效 |
|
K2 |
K2:下降(下行) |
開關,閉合有效 |
|
K3 |
K3:外部故障輸入 |
開關,斷開有效 |
|
K4 |
K4:故障復位 |
脈沖,上升沿有效,復位功能 |
|
K5 |
K5:高速運行 |
開關,閉合有效 |
|
K6 |
K6:低速運行 |
此處為開關端子,閉合有效 |
|
COM |
公共端 |
+24V 的地 |
|
RO1-RO2 繼電器 |
帶常開與常閉輸出功能 |
AC250V/3A |
|
RO1A-RO1C故障報警 |
常開輸出 |
變頻器有故障時,吸合 |
|
RO2A-RO2B 抱閘控制 |
常閉輸出 |
需要輸出抱閘控制時,打開 |
|
L1 輸入交流電抗器 |
輸入交流電抗器 |
120A/0.13mH |
|
PG Card |
PG 反饋測速卡 |
接收旋轉編碼器信號的轉換卡 |
|
VCC+ |
PG 編碼器電源 |
12V~15V,輸出可調節 |
|
COM1 |
PG 編碼器電源地 |
VCC+的地 |
|
PG |
旋轉編碼器(TONGHOW) |
1024 線/12V~30V 電源輸入 |
|
R、S、T |
變頻器三相輸入端子 |
|
|
U、V、W |
變頻器三相輸出端子 |
|
|
X1、X2、X3 |
三相 380V 電源 |
|
|
U1/U2/U3 |
三臺異步電動機的接線端子組合,并聯 連接在變頻器的輸出端上。 |
|
|
V1/V2/V3 |
|
|
|
W1/W2/W3 |
|
4、變頻參數設定
依據外部端子的接線功能要求及控制要求,變頻器內部參數設置如下:
|
功能碼 |
功能含義 |
參數設置 |
功能描述 |
備注 |
|
F0-01 |
速度控制模式 |
1/3 |
1:無PG 矢量控制(SVC) 3:有PG 矢量控制(VC) |
兩種控制模式,全部進行了調試。 |
|
F0-02 |
速度指令選擇 |
4 |
多段速端子給定 |
采用兩段速控制 |
|
F0-03 |
運行指令通道 |
1 |
端子指令通道 |
|
|
F0-02 |
速度指令選擇 |
4 |
多段速端子給定 |
采用兩段速控制 |
|
F0-10 |
最大輸出頻率 |
60.00 |
最大頻率60Hz |
對應42m/min 的升降機運行速度 |
|
FC-00 |
多段速分級給定1 |
28.0 |
最大頻率的28%(低速) |
運行頻率16.8Hz |
|
FC-01 |
多段速分級給定2 |
100.0 |
最大頻率的100%(高速) |
運行頻率60Hz |
|
F8-03 |
直線加速時間 |
6.0 |
6 秒加速時間 |
|
|
F8-04 |
直線減速時間 |
2.0 |
2 秒減速時間 |
|
|
F6-03 |
起動開始頻率 |
1.50 |
起動頻率為1.5HZ |
在無PG 矢量控制時使用,確保升降機起動瞬間不溜鉤 |
|
F6-04 |
起動頻率保持時間 |
0.2 |
起動頻率的保持時間為 0.2秒 |
|
|
電機參數組 |
||||
|
F1-00 |
電機額定功率 |
33.0 |
為3 臺11kW 電機的功率總和 |
|
|
F1-03 |
電機額定頻率 |
50.00 |
額定頻率為50Hz |
|
|
F1-04 |
電機額定轉速 |
1395 |
額定轉速為1395RPM |
|
|
F1-01 |
電機額定電壓 |
380 |
額定電壓為380V |
|
|
F1-02 |
電機額定電流 |
70.5 |
額定電流為3 臺電機的電流總和 |
|
|
F1-05 |
電機定子電阻 |
0.123 |
|
通過參數自學習得到相關參數 |
|
F1-06 |
電機轉子電阻 |
0.249 |
|
|
|
F1-07 |
電機定、轉子電感 |
23.4 |
|
|
|
F1-08 |
電機定、轉子互感 |
22.8 |
|
|
|
F1-09 |
電機空載電流 |
30.74 |
|
|
|
輸入輸出端子組 |
||||
|
F4-50 |
S1 端子功能選擇 |
1 |
正轉運行,升降機上行 |
|
|
F4-51 |
S2 端子功能選擇 |
2 |
反轉運行,升降機下行 |
|
|
F4-52 |
S3 端子功能選擇 |
8 |
外部故障輸入 |
|
|
F4-53 |
S4 端子功能選擇 |
7 |
故障復位 |
|
|
F4-54 |
S5 端子功能選擇 |
5 |
多段速端子1 |
X4 閉合為低速段 X3 和HDI1 閉合為高速段 |
|
F4-55 |
HDI1 端子功能選擇 |
10 |
多段速端子2 |
|
|
F5-02 |
RO1 輸出選擇 |
15 |
故障輸出 |
故障輸出時,抱閘輸出有效。 |
|
F5-32 |
RO2 輸出選擇 |
7 |
抱閘輸出 |
|
|
抱閘控制邏輯 |
||||
|
F5-33 |
抱閘、接觸器控制選擇(只適合端子指令通道) |
1 |
抱閘由變頻器控制,接觸器由外部控制器控制 |
|
|
F5-34 |
抱閘合閘延時 |
0s |
該時間可以配合停機抱閘頻率來調整 |
|
|
F5-35 |
抱閘松閘延時 |
0s |
|
|
|
F5-36 |
停機抱閘頻率 |
3Hz |
對于開環矢量控制,該頻率可以有效防止停機抱閘時溜鉤 |
|
|
F5-37 |
停機延時時間 |
0.2s |
定義變頻器抱閘合閘信號輸出后。變頻器可以持續維持輸出轉矩的時間,用來消除停機時溜鉤問題。 |
|
五、調試及現場測試波形
檢查接線正確無誤,試運行后一切正常后,需對電機進行參數自學習。 對于一拖多并聯矢量控制,電機參數輸入需要注意:
1、 一拖多系統中,電機組參數中,電機額定功率輸入是否為各臺電機之和;
2、 一拖多系統中,電機組參數中,電機額定電流輸入是否為各臺電機之和;
3、 輸入合理的自學習加減速時間。
4、 由于此系統采用主電路和控制電路一起供電方式,變頻器參數輸入后,進行邏輯時序驗證時,要注意現場情況,以防意外發生。
在現場對閉環矢量控制和開環矢量控制兩種控制方式進行了調試和功能驗證。合理設定變頻器松、抱閘邏輯時序相關參數,實現在啟動、停止無明顯溜鉤現象;高、低速運行,電機和變頻器運行正常,達到良好的控制效果。
下面附上在滿載實驗時現場記錄波形:
滿載運行測試(42m/min),運行中相關參數的動態捕捉及說明

上圖為升降機在42m/min 的上升與下降運行的過程狀態參數波形圖: 該波形圖同時監控了運行頻率、輸出電流、輸出轉矩、輸出電壓、母線電壓參數。從該圖中,能夠清晰反應在升降機的運行過程中,變頻器的運行狀況。升降機經歷了上升啟動開閘、加速上升、平穩上升、減速上升、上升停機報閘、停機、下降啟動開閘、加速下降、高速平穩下降、低速平穩下降、下降停機抱閘,停機的全過程。
六、變頻升降機的優勢
施工升降機采用變頻調速后,使升降機實現平穩操作,提高運行效率,消除起制動沖擊, 減少電氣維護,降低電能消耗,提高功率因素等。變頻調速方法具有的顯著特點如下:
1、 效率高,最高運行速度可打傳統升降機兩倍;
2、 無極調速有效解決結構和機構的沖擊,延長齒輪、齒條、滾輪等機械結構的使用壽命;
3、 變頻器的軟啟動功能,降低了電機啟動時對電網的沖擊電流,緩解了用電設備間的相互影響。
4、 可選擇的加減速曲線,保證人乘坐的舒適感和減少載貨時的沖擊;可調節加減速時間和運行頻率,確保升降機的準確平層。降低對司機的要求。
5、采用變頻器減少了升降機的設備維護成本,為企業帶來經濟效益。

